Cổng thông tin Trường THPT Lộc Thanh
149 Lê Lợi, TP Bảo Lộc, Tỉnh Lâm Đồng.
Cổng thông tin Trường THPT Lộc Thanh
149 Lê Lợi, TP Bảo Lộc, Tỉnh Lâm Đồng.
 Cổng thông tin Trường THPT Lộc Thanh
149 Lê Lợi, TP Bảo Lộc, Tỉnh Lâm Đồng.
Cổng thông tin Trường THPT Lộc Thanh
149 Lê Lợi, TP Bảo Lộc, Tỉnh Lâm Đồng.

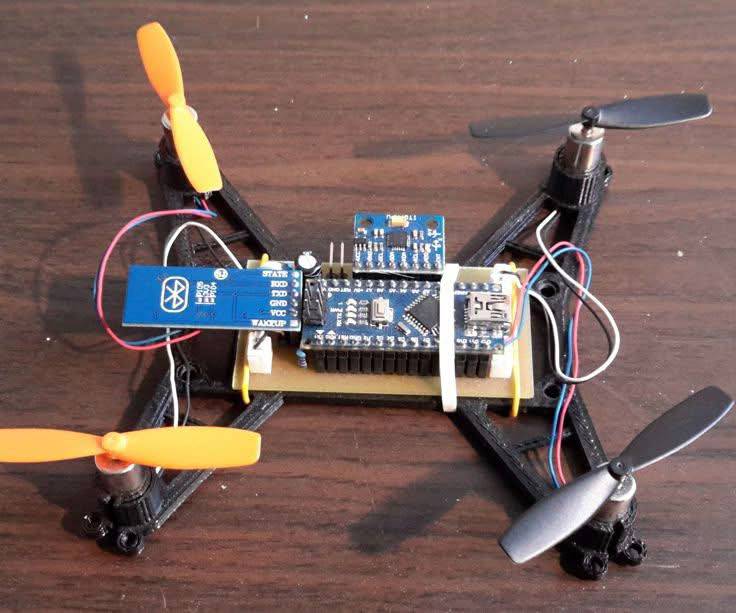
Trong thời đại công nghệ hiện nay, việc chế tạo và ứng dụng các thiết bị bay không người lái – flycam – đã trở thành một lĩnh vực hấp dẫn cả với những người đam mê điện tử lẫn các nhà nghiên cứu công nghệ. Một trong những phương pháp tiếp cận phổ biến và kinh tế để thiết kế flycam là sử dụng Arduino – một nền tảng lập trình và điều khiển mở, thân thiện với người dùng. Với Arduino, người dùng có thể tự mình lập trình các chức năng cơ bản cho flycam, từ điều khiển cánh quạt, ổn định bay, đến thu thập dữ liệu từ cảm biến, mà không cần đến các bộ điều khiển phức tạp chuyên dụng.
Một flycam được thiết kế từ Arduino thường bao gồm các thành phần cơ bản như: khung (frame), động cơ brushless kèm cánh quạt, ESC (Electronic Speed Controller) để điều khiển tốc độ động cơ, pin cung cấp năng lượng, mạch Arduino, và các cảm biến hỗ trợ như con quay hồi chuyển (gyroscope), gia tốc kế (accelerometer) hay cảm biến từ trường (magnetometer). Sự kết hợp giữa các thành phần này cho phép flycam thực hiện các thao tác bay ổn định và chính xác, đồng thời phản ứng nhanh với các tác động từ môi trường bên ngoài.
Điểm mạnh nổi bật của việc sử dụng Arduino trong thiết kế flycam là tính linh hoạt. Người chế tạo có thể dễ dàng lập trình các chế độ bay khác nhau, chẳng hạn bay tự động theo lập trình sẵn, giữ thăng bằng, hay bay điều khiển từ xa qua Bluetooth, Wi-Fi, hoặc RF. Arduino còn cho phép tích hợp các thiết bị mở rộng khác như camera, GPS hoặc cảm biến đo khoảng cách, giúp flycam trở nên thông minh và đa năng hơn. Điều này đặc biệt hữu ích trong các ứng dụng như khảo sát địa hình, quay phim – chụp ảnh từ trên cao, hay thậm chí là nghiên cứu môi trường.
Bên cạnh đó, thiết kế flycam dựa trên Arduino cũng mang tính giáo dục cao. Quá trình lắp ráp và lập trình giúp người học hiểu rõ cơ chế hoạt động của các thành phần điện tử, nguyên lý cân bằng bay, và các thuật toán điều khiển cơ bản. Đồng thời, nó cũng thúc đẩy khả năng sáng tạo, tư duy logic, và kỹ năng giải quyết vấn đề thông qua việc tinh chỉnh phần cứng và phần mềm để đạt được hiệu suất bay tối ưu.
Tuy nhiên, việc thiết kế flycam từ Arduino cũng gặp phải một số thách thức. Do Arduino có khả năng xử lý giới hạn, nên việc tích hợp nhiều cảm biến hoặc thực hiện các thuật toán phức tạp đôi khi gây ra hiện tượng trễ hoặc giảm hiệu suất. Vì vậy, người chế tạo cần tối ưu hóa mã lập trình và lựa chọn các linh kiện phù hợp để đảm bảo flycam bay ổn định, tiết kiệm năng lượng và an toàn.
Tóm lại, thiết kế flycam dựa trên Arduino là một dự án công nghệ đầy hấp dẫn, kết hợp giữa lý thuyết điều khiển, kỹ thuật điện tử và lập trình. Nó không chỉ giúp hiện thực hóa ý tưởng bay không người lái mà còn mở ra cơ hội học tập, thử nghiệm và sáng tạo cho các nhà phát triển trẻ và những người yêu thích công nghệ. Với sự phát triển liên tục của Arduino và các linh kiện hỗ trợ, flycam DIY ngày càng trở nên thông minh, nhỏ gọn và đa năng, đánh dấu một bước tiến quan trọng trong việc phổ cập công nghệ bay cá nhân
Tác giả: Trường THPT Lộc Thanh Quản trị website nhà trường
Nguồn tin: NGUYỄN TRUNG CHỈNH
Ý kiến bạn đọc
Những tin mới hơn
Những tin cũ hơn



![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 QUYẾT ĐỊNH Thành lập Điểm thi để tổ chức khảo sát năng lực tiếng Anh đối với giáo viên phổ thông đặt tại Trường THPT Lộc Thanh
QUYẾT ĐỊNH Thành lập Điểm thi để tổ chức khảo sát năng lực tiếng Anh đối với giáo viên phổ thông đặt tại Trường THPT Lộc Thanh
 Danh sách Kết quả thí sinh bảng R3 được vào vòng chung kết và triệu tập thí sinh tham dự Tập huấn Vòng Chung kết Cuộc thi Sáng tạo Robotics tỉnh Lâm Đồng lần thứ I, năm 2026
Danh sách Kết quả thí sinh bảng R3 được vào vòng chung kết và triệu tập thí sinh tham dự Tập huấn Vòng Chung kết Cuộc thi Sáng tạo Robotics tỉnh Lâm Đồng lần thứ I, năm 2026
 20 Năm Ngày Trở Về: THPT Lộc Thanh – Nơi Tình Yêu Và Khát Vọng Bắt Đầu
20 Năm Ngày Trở Về: THPT Lộc Thanh – Nơi Tình Yêu Và Khát Vọng Bắt Đầu
 Trang thư viện số của THPT Lộc Thanh
Trang thư viện số của THPT Lộc Thanh
 HỌC SINH TRƯỜNG THPT LỘC THANH ĐƯỢC KHÁM SỨC KHỎE MIỄM PHÍ
HỌC SINH TRƯỜNG THPT LỘC THANH ĐƯỢC KHÁM SỨC KHỎE MIỄM PHÍ
 Về việc công khai, niêm yết danh mục dự kiến khai thác cơ sở nhà, đất dôi dư sau khi thực hiện sắp xếp đơn vị hành chính trên địa bàn tỉnh Lâm Đồng năm 2026 đến 2030
Về việc công khai, niêm yết danh mục dự kiến khai thác cơ sở nhà, đất dôi dư sau khi thực hiện sắp xếp đơn vị hành chính trên địa bàn tỉnh Lâm Đồng năm 2026 đến 2030
 Đề và bài giải chi tiết thi tốt nghiệp môn Vật Lí năm 2026
Đề và bài giải chi tiết thi tốt nghiệp môn Vật Lí năm 2026
 Tự chủ chiến lược công nghệ: "Lá chắn thép" bảo vệ nền tảng tư tưởng của Đảng trong kỷ nguyên vươn mình - Bài 1: Không gian mạng-Chiến trường không tiếng
Tự chủ chiến lược công nghệ: "Lá chắn thép" bảo vệ nền tảng tư tưởng của Đảng trong kỷ nguyên vươn mình - Bài 1: Không gian mạng-Chiến trường không tiếng
 Thư mời họp mặt kỉ niệm 20 năm ra trường niên khóa 2003-2006
Thư mời họp mặt kỉ niệm 20 năm ra trường niên khóa 2003-2006
 Xúc động Lễ Tri ân và Trưởng thành của học sinh lớp 12 niên khóa 2023-2026 trường THPT Lộc Thanh
Xúc động Lễ Tri ân và Trưởng thành của học sinh lớp 12 niên khóa 2023-2026 trường THPT Lộc Thanh